Calculates the shortest path from an origin to a goal
shortestPath(x, origin, goal, ...)Arguments
- x
TransitionLayerobject- origin
SpatialPoints, vector or matrix with coordinates, at the moment only the first cell is taken into account
- goal
SpatialPoints, vector or matrix with coordinates
- ...
Additional argument: output
Value
Transition object
Details
As an additional argument output, the desired output object can be specified: either “TransitionLayer” (default), “TransitionStack” or “SpatialLines”.
If there is more than one path either (1) transition values in the TransitionLayer get values of 1 / number of paths or (2) the SpatialLines object will contain more than one line.
See also
Examples
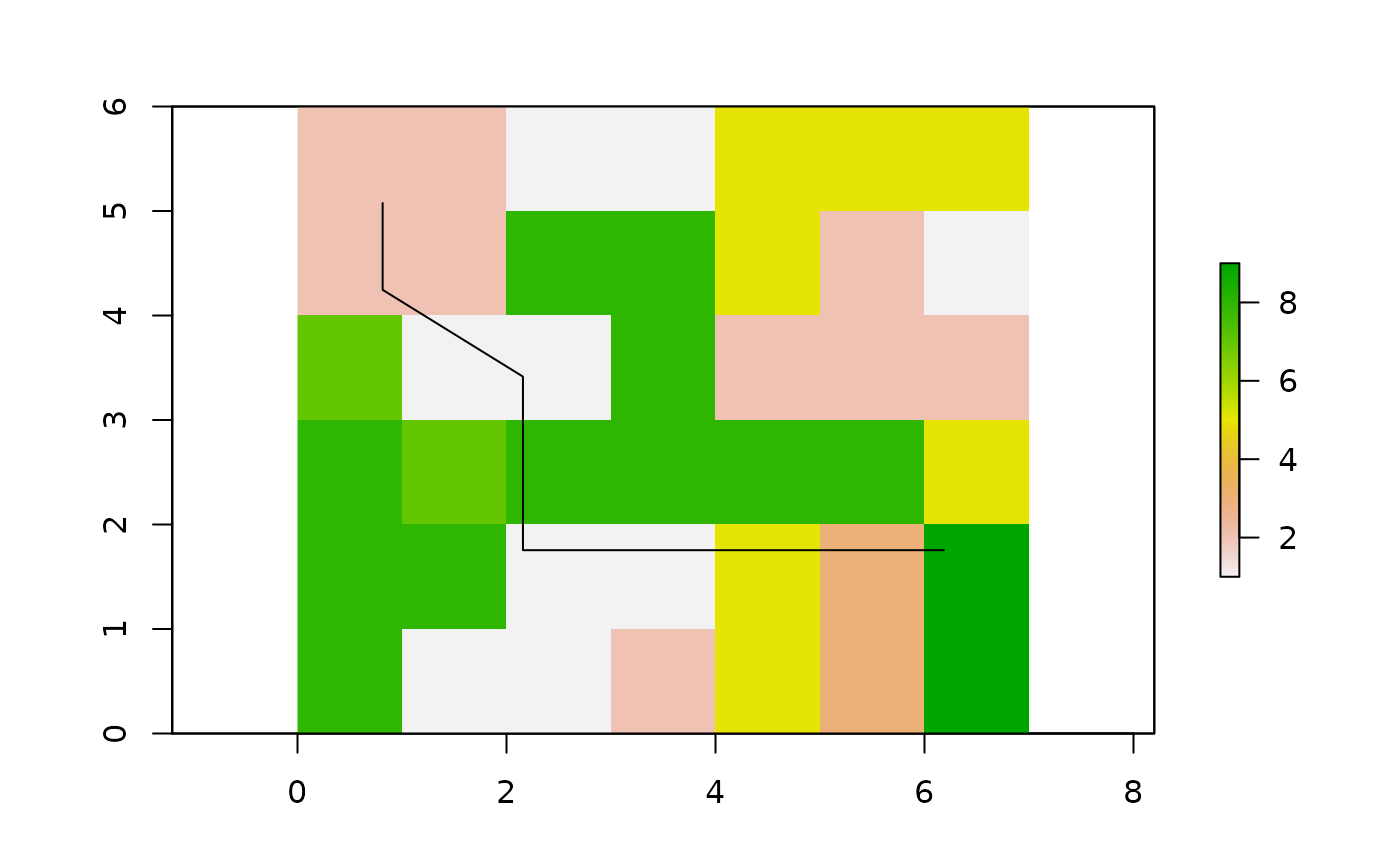
#example equivalent to that in the documentation on r.cost/r.drain in GRASS
r <- raster(nrows=6, ncols=7, xmn=0, xmx=7, ymn=0, ymx=6, crs="+proj=utm +units=m")
r[] <- c(2, 2, 1, 1, 5, 5, 5,
2, 2, 8, 8, 5, 2, 1,
7, 1, 1, 8, 2, 2, 2,
8, 7, 8, 8, 8, 8, 5,
8, 8, 1, 1, 5, 3, 9,
8, 1, 1, 2, 5, 3, 9)
tr <- transition(r, function(x) 1/mean(x), 8)
# 1/mean: reciprocal to get permeability
tr <- geoCorrection(tr)
c1 <- c(5.5,1.5)
c2 <- c(1.5,5.5)
#make a SpatialLines object for visualization
sPath1 <- shortestPath(tr, c1, c2, output="SpatialLines")
plot(r)
lines(sPath1)
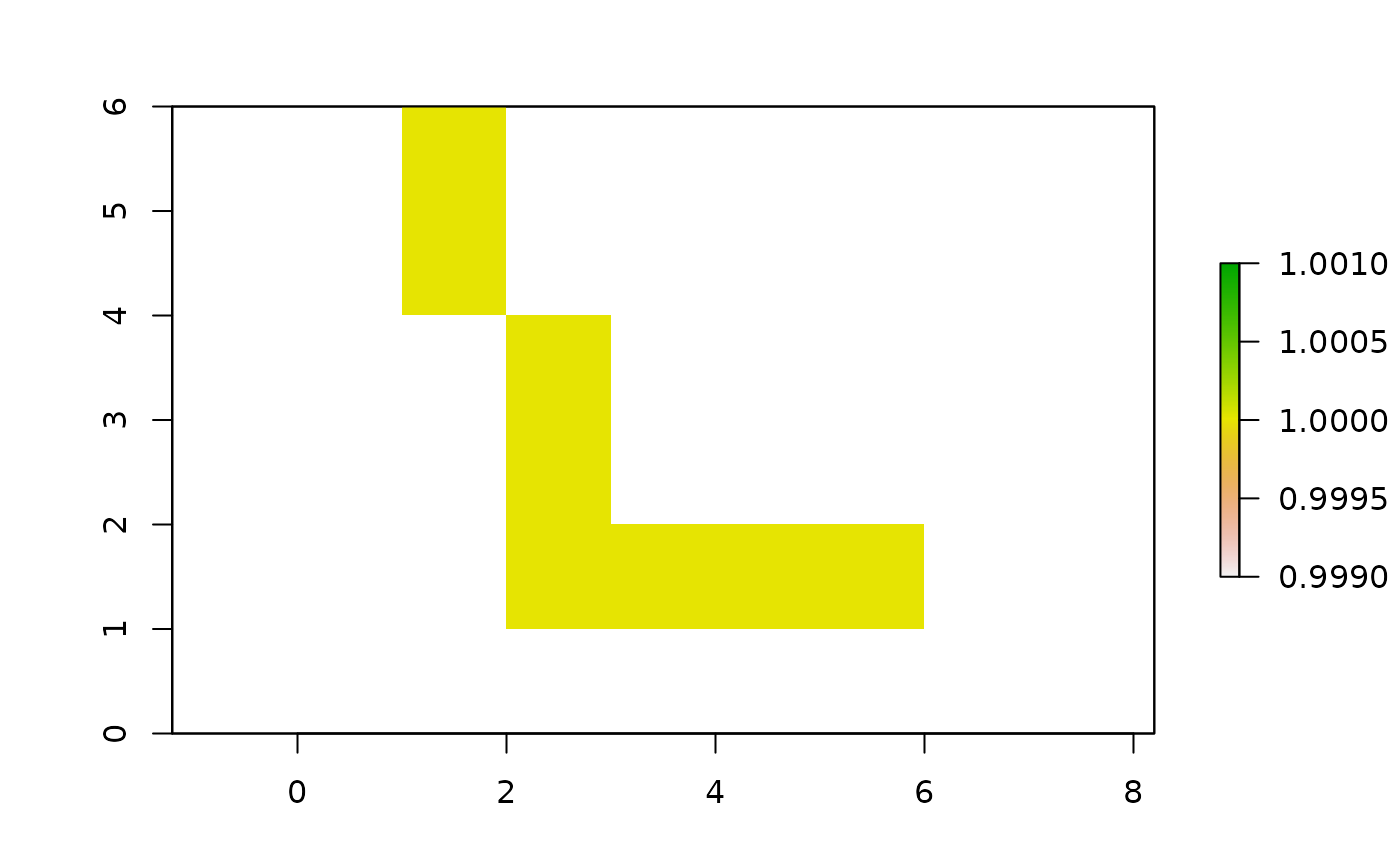
 #make a TransitionLayer for further calculations
sPath2 <- shortestPath(tr, c1, c2)
plot(raster(sPath2))
#make a TransitionLayer for further calculations
sPath2 <- shortestPath(tr, c1, c2)
plot(raster(sPath2))